
SquareBot 1
-
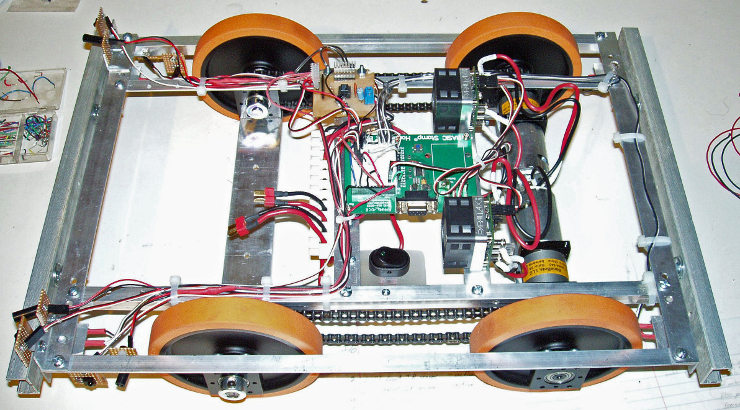
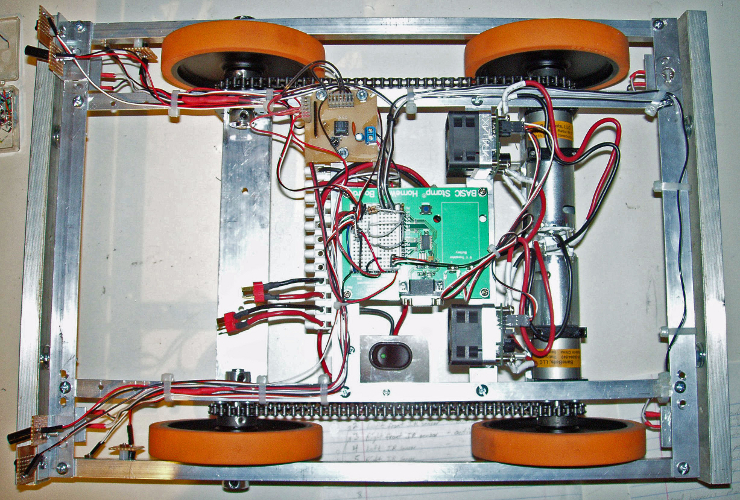
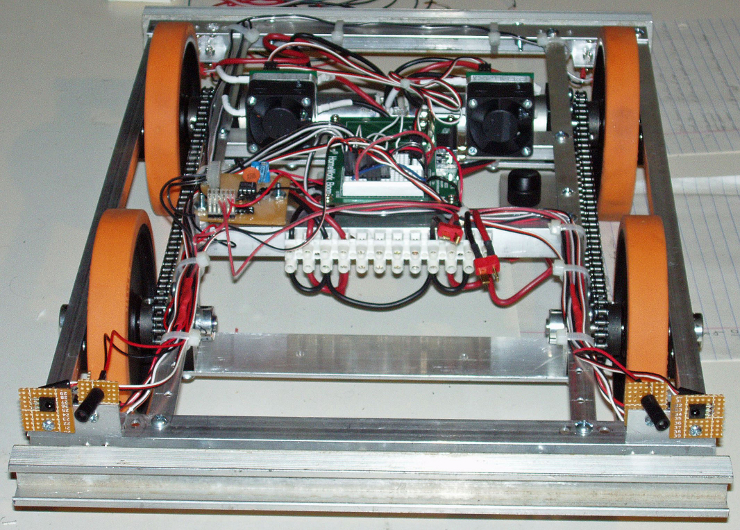
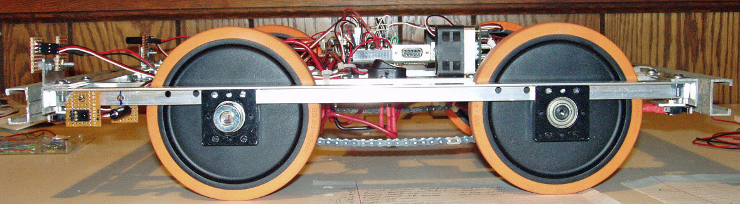
Hover the mouse over areas in the photo for brief descriptions. -
-
-
-
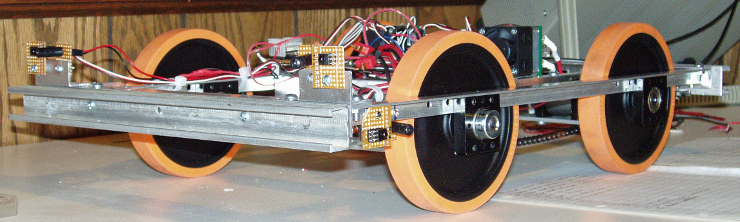
1st attempt at autonomous navigation; 1st time build from scratch; utilizing the Parallax Basic Stamp processor.
Forthcoming description of parts, interesting components/structures, and how it operated.